Вверх: Введение
Далее: Датчики волнового фронта
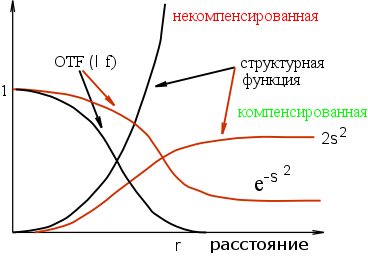
Предположим, что все атмосферные аберрации со шкалами
![]() и больше (т.е. моды с низким порядком) исправлены.
Какой будет структурная функция оставшихся (остаточных)
аберраций? Количественно, она будет расти с расстоянием
и больше (т.е. моды с низким порядком) исправлены.
Какой будет структурная функция оставшихся (остаточных)
аберраций? Количественно, она будет расти с расстоянием
![]() и на больших расстояниях выйдет на постоянный уровень
и на больших расстояниях выйдет на постоянный уровень
![]() (в два раза больше
остаточной дисперсии фазы).
(в два раза больше
остаточной дисперсии фазы).
Оптическая передаточная функция OTF пропорциональна
![]() .
Вместо того, чтобы уменьшаться до нуля на больших частотах
.
Вместо того, чтобы уменьшаться до нуля на больших частотах
![]() ,
она станет постоянной на уровне
,
она станет постоянной на уровне
| (1) |
Для больших телескопов
![]() PSF частично исправленного изображения может быть приблизительно
представлена суммой изображения, качество которого определяется атмосферой
(гало)
PSF частично исправленного изображения может быть приблизительно
представлена суммой изображения, качество которого определяется атмосферой
(гало)
![]() и ограниченного дифракцией ядра
и ограниченного дифракцией ядра
![]() :
:
| (2) |
Пример частично исправленного изображения звезды (типичная PSF
для адаптивной оптики) приведен на рисунке. Для больших телескопов
![]() гало намного шире ядра. Следовательно, центральная интенсивность
PSF определяется ядром и число Штреля равно когерентной энергии
гало намного шире ядра. Следовательно, центральная интенсивность
PSF определяется ядром и число Штреля равно когерентной энергии
![]() .
Это приближение широко используется, и иногда
.
Это приближение широко используется, и иногда
![]() берется как эквивалент числа Штреля.
берется как эквивалент числа Штреля.
Вопрос:
Какое число Штреля совответствует остаточной фазовой дисперсии в
1 радиан
![]() ?
Каков верхний предел остаточной дисперсии, необходимый для достижения
числа Штреля в 95%?
?
Каков верхний предел остаточной дисперсии, необходимый для достижения
числа Штреля в 95%?
Вопрос: Предположим, мы знаем число Штреля для длины волны 0.5 микрон. Сможете вы вычислить его для другой длины волны, например 2.2 микрона?
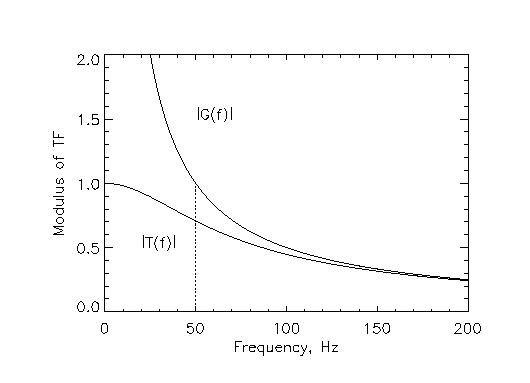
Очень важно понимать, что коррекция на больших пространственных
шкалах оказывает влияние и на малых шкалах, так как она
устраняет наклоны волнового фронта. Следовательно, структурная
функция остаточной фазы растет медленнее, чем структурная функция
неисправленных атмосферных аберраций. Если структурная функция
меньше, то OTF выше, и PSF уже. Ширина гало
![]() меньше чем
ширина PSF, соответствующая данному качеству изображения.
Выигрыш в FWHM может быть порядка двух раз. Даже для очень
низкого числа Штреля улучшение разрешения, достигаемое с помощью
адаптивной оптики, может быть значительным. Это происходит,
когда адаптивные системы низкого порядка используются при наблюдениях
в видимой области спектра.
меньше чем
ширина PSF, соответствующая данному качеству изображения.
Выигрыш в FWHM может быть порядка двух раз. Даже для очень
низкого числа Штреля улучшение разрешения, достигаемое с помощью
адаптивной оптики, может быть значительным. Это происходит,
когда адаптивные системы низкого порядка используются при наблюдениях
в видимой области спектра.
 Рисунок 3.2 из книги Роддиера (1999) показывает выигрыш в разрешении
(выигрыш в числе Штреля по сравнению с неисправленными изображениями
с большим телескопом), достигаемый при компенсации мод Зернике до
данного порядка. Порядок 1 соответствует исправлению за наклоны,
порядок 2 - также исправлению за расфокусировку и астигматизм,
и т.д. Абсолютные значения числа Штреля нанесены штриховыми линиями.
Максимальный выигрыш соответствует числу Штреля около 0.3.
Рисунок 3.2 из книги Роддиера (1999) показывает выигрыш в разрешении
(выигрыш в числе Штреля по сравнению с неисправленными изображениями
с большим телескопом), достигаемый при компенсации мод Зернике до
данного порядка. Порядок 1 соответствует исправлению за наклоны,
порядок 2 - также исправлению за расфокусировку и астигматизм,
и т.д. Абсолютные значения числа Штреля нанесены штриховыми линиями.
Максимальный выигрыш соответствует числу Штреля около 0.3.
Первые деформируемые зеркала (DM) состояли из отдельных сегментов,
каждый из которых управлялся тремя пьезоэлектрическими актуаторами
(толкателями).
По распространенной в настоящее время технологии к массиву
пьезоэлектрических актуаторов прикрепляется тонкая лицевая пластина
(смотри рисунок).
Актуаторы не изготавливаются отдельно, многослойная пьезокерамическая
пластина делится на отдельные актуаторы. Этот тип DM использован в
системе адаптивной оптики телескопа Джемини.
| Количество актуаторов | 100 - 1500 |
| Промежутки между актуаторами | 2-10 мм |
| Форма электродов | прямоугольная или шестиугольная |
| Напряжение | несколько сотен вольт |
| Амплитуда перемещения | несколько микронов |
| Резонансная частота | несколько килогерц |
| Стоимость | высокая |
Вопрос: Каков физический размер деформируемого зеркала с 1000 актуаторами и промежутками между актуаторами 5 мм?
Вопрос: Какая амплитуда перемещения (в микрометрах) необходима для исправления качества изображения в 2 секунды на 4-м телескопе? Предполагается, что наклоны исправляются отдельным зеркалом.
Деформируемые зеркала этого типа разрабатывались первоначально для военных применений, они дороги. Некоторые примеры можно найти на следующих WEB-страницах: Xinetics или Turn, Ltd. Пьезоэлектрические актуаторы имеют гистерезис около 10%. Максимальная деформация ограничена насыщением пьезоэлектрического вещества (иногда прикладываемое напряжение также ограничено). Ниже показано деформируемое зеркало системы адаптивной оптики телескопа Кека.

Когда некоторое напряжение
![]() приложено к
приложено к ![]() -му актуатору, форма
деформируемого зеркала описывается функцией воздействия
-му актуатору, форма
деформируемого зеркала описывается функцией воздействия
![]() умноженной на
умноженной на
![]() .
Для деформируемых зеркал со сплошным лицевым слоем она
имеет колоколообразную (или гауссову) форму (между актуаторами
имеется некоторое перекрытие, обычно 15%). Когда все актуаторы
приведены в действие, форму зеркала можно представить как
.
Для деформируемых зеркал со сплошным лицевым слоем она
имеет колоколообразную (или гауссову) форму (между актуаторами
имеется некоторое перекрытие, обычно 15%). Когда все актуаторы
приведены в действие, форму зеркала можно представить как
| (3) |
Для управления пьезоэлектрическим деформируемым зеркалом необходим многоканальный высоковольтный усилитель. Он должен иметь короткое время реакции, несмотря на высокую емкостную нагрузку электродов зеркала.
Биморфное зеркало состоит из двух пьезоэлектрических пластин, которые скреплены между собой и поляризованы в противоположных направлениях (параллельных осям). Массив электродов расположен между двумя пластинами. Лицевая и обратная поверхности заземлены. Лицевая поверхность работает как зеркало.
Когда к электроду прикладывается напряжение, одна пластина сжимается, а противоположная - растягивается, что приводит к местному искривлению. Местная кривизна пропорциональна напряжению, поэтому эти DM называются зеркалами кривизны.
Сложность свойств биморфных зеркал в том, что в них контролируется
не форма поверхности, а ее кривизна. Для одного приложенного
напряжения
![]() ,
деформация пропорциональна
,
деформация пропорциональна
![]() , где
, где ![]() - это пространственный размер деформируемой области.
Аналогично, насыщение пьезоэлектрической керамики необходимо
определять не через смещение поверхности, а через максимальную
кривизну (или напряжение).
- это пространственный размер деформируемой области.
Аналогично, насыщение пьезоэлектрической керамики необходимо
определять не через смещение поверхности, а через максимальную
кривизну (или напряжение).
Геометрия электродов биморфных деформируемых зеркал радиально-кольцевая, чтобы наилучшим образом соответствовать апертуре телескопа, имеющей форму кольца. Для данного количества электродов (то есть данного количества контролируемых параметров) биморфные зеркала дают самую высокую степень исправления турбулентности, выше чем у сегментных зеркал.
Для биморфных зеркал не существует простой функции воздействия. Форму поверхности как функцию приложенных напряжений необходимо определить из решения уравнения Пуассона, которое описывает деформацию тонкой пластины под действием приложенной к ней силы. Для решения этого уравнения также должны быть определены граничные условия. В действительности, такие зеркала делаются больше размера пучка, и внешнее кольцо электродов используется для определения граничных условий - наклонов на периферии пучка.
В очень упрощенном виде уравнение Пуассона можно записать так.
Кривизна описывается оператором Лапласа (суммой вторых
производных по
![]() и
и ![]() ).
В этом пространстве Фурье лапласиан соответствует умножению на
).
В этом пространстве Фурье лапласиан соответствует умножению на
![]() . Если
. Если
![]() - это
преобразование Фурье распределения напряжения, то деформация
- это
преобразование Фурье распределения напряжения, то деформация
![]() равна
равна
| (4) |
Распределение искажений волнового фронта по пространственным
частотам зависит от модели турбулентности. Для модели Колмогорова
амплитуда увеличивается на низких частотах как
![]() ,
почти как частота в степени -2. Это означает, что амплитуда
напряжения, которое необходимо приложить к деформируемому зеркалу,
почти не зависит от частоты. В этом смысле биморфные зеркала
"хорошо подходят" к турбулентности.
,
почти как частота в степени -2. Это означает, что амплитуда
напряжения, которое необходимо приложить к деформируемому зеркалу,
почти не зависит от частоты. В этом смысле биморфные зеркала
"хорошо подходят" к турбулентности.
Вопрос: Предположим, что турбулентность очень сильная и деформируемое зеркало приближается к пределу насыщения. На каких пространственных частотах раньше наступит насыщение, на низких или на высоких? Изменится ли ответ для сегментного зеркала?
Механическая монтировка биморфного зеркала непроста: с одной стороны, оно должно иметь свободу для деформации, с другой, оно должно быть зафиксировано в оптической системе. Обычно используют 3 V-образных зажима по краям.
Биморфные деформируемые зеркала были разработаны для астрономических
целей по инициативе
Ф.Роддиера, как дешевая альтернатива сегментным зеркалам. Они используются
в системах адаптивной оптики на телескопах CFHT, Субару, Джемини-Север
(временно), Очень Большом телескопе. Количество актуаторов остается
ограниченным. Биморфные зеркала изготавливаются
CILAS
во Франции и Laplacian Optics
в США, а также рядом других компаний.
| Количество актуаторов | 13 - 85 |
| Размер зеркала | 30-200 мм |
| Форма электродов | радиальная |
| Напряжение | несколько сотен вольт |
| Резонансная частота | более 500 герц |
| Стоимость | умеренная |
Крайне необходимы новые технологии для создания деформируемых зеркал. Чтобы исправить турбулентность на очень больших телескопах (диаметром 30-100 м) в видимой области спектра, потребуются зеркала с 10000 - 100000 актуаторами! Одна возможность для создания таких зеркал - кремниевая технология (так называемые MOEMS - микро-опто-электро-механические системы). Такие DM изготавливаются с помощью микролитографии, подобно электронным микросхемам, отклонение маленьких элементов зеркала осуществляется электростатическими силами. Недостатками MOEMS являются недостаточные перемещения и малый размер элементов зеркала. С примерами можно ознакомиться на странице MEMS Optical .
Небольшие зеркала с непрерывной мембраной и электростатическим управлением, изготовленные по кремниевой технологии, уже можно приобрести. Они очень дешевы. Число актуаторов не превышает 50, и одиночная мембрана непрочна.
Другой метод управления фазой света - использование жидких кристаллов, как в мониторах, имеющих до миллиона управляемых элементов. До недавнего времени жидкие кристаллы были очень медленными, но сейчас это ограничение преодолено. Все же фазовый сдвиг, вносимый жидкими кристаллами, остается очень маленьким и к тому же зависит от длины волны.
Астрономы всегда мечтали об исправлении турбулентности с помощью деформируемых вторичных зеркал телескопов, чтобы сделать систему адаптивной оптики как можно более простой и эффективной. Ниже на рисунке показан прототип деформируемого вторичного зеркала с 30 элементами (SPIE, V. 4007, P. 524-531, 2000).
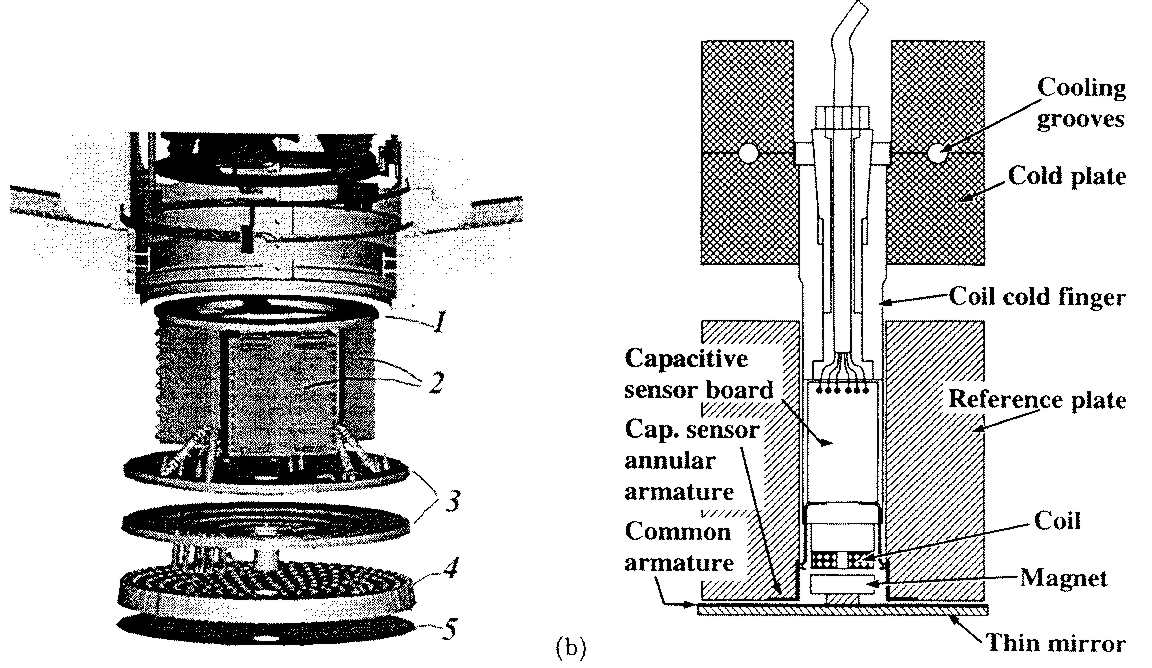 В настоящее время изготовлено деформируемое вторичное зеркало с 336 элементами
для 6.5-м телескопа MMT. Оно состоит из тонкой (около 1 мм) асферичной
стеклянной оболочки и толстого стеклянного основания. В основании
установлены катушки, а к оболочке приклеены маленькие магниты. Зазор
между основанием и оболочкой - несколько десятков микрон (воздух в
зазоре подавляет резонансные колебания). Форма оболочки
контролируется массивом емкостных датчиков, которые связаны с катушками
в систему с замкнутым циклом. Управление такой многопараметрической
системой очень сложно, но в результате было достигнуто время реакции
1.5 миллисекунд. Не стоит говорить, что такие зеркала
очень дороги.
В настоящее время изготовлено деформируемое вторичное зеркало с 336 элементами
для 6.5-м телескопа MMT. Оно состоит из тонкой (около 1 мм) асферичной
стеклянной оболочки и толстого стеклянного основания. В основании
установлены катушки, а к оболочке приклеены маленькие магниты. Зазор
между основанием и оболочкой - несколько десятков микрон (воздух в
зазоре подавляет резонансные колебания). Форма оболочки
контролируется массивом емкостных датчиков, которые связаны с катушками
в систему с замкнутым циклом. Управление такой многопараметрической
системой очень сложно, но в результате было достигнуто время реакции
1.5 миллисекунд. Не стоит говорить, что такие зеркала
очень дороги.
Вопрос: Сможете ли вы предложить другие оригинальные методы изготовления деформируемых зеркал?
Адаптивная оптика работает по замкнутому циклу: датчик волнового фронта измеряет остаточные отклонения волнового фронта от идеального и посылает соответствующие команды на деформируемое зеркало. Поэтому небольшие недостатки DM (как гистерезис или статические аберрации) не очень важны: они исправляются автоматически, вместе с атмосферными аберрациями. Рассмотрим управление замкнутым циклом во времени.
Пусть ![]() -
входной сигнал (коэффициент какой-то моды Зернике),
-
входной сигнал (коэффициент какой-то моды Зернике),
![]() -
сигнал, посланный на деформируемое зеркало, и
-
сигнал, посланный на деформируемое зеркало, и
![]() - сигнал об ошибках, измеряемых датчиком волнового фронта (WFS).
Сигнал об ошибках должен быть профильтрован перед тем, как послать его
на DM, иначе сервосистема будет нестабильной. Этот фильтр по частотам
- сигнал об ошибках, измеряемых датчиком волнового фронта (WFS).
Сигнал об ошибках должен быть профильтрован перед тем, как послать его
на DM, иначе сервосистема будет нестабильной. Этот фильтр по частотам
![]() называется передаточной функцией незамкнутого цикла.
называется передаточной функцией незамкнутого цикла.
Чтобы вычислить реакцию системы в замкнутом цикле, мы запишем уравнение управления в частотах (преобразование Фурье):
| (5) |
 |
|||
 |
(6) |
 Самый простой пример передаточной функции незамкнутого цикла - это
чистый
интегратор.
Управляющий сигнал вычисляется как интеграл сигнала об ошибках
с некоторым коэффициентом
Самый простой пример передаточной функции незамкнутого цикла - это
чистый
интегратор.
Управляющий сигнал вычисляется как интеграл сигнала об ошибках
с некоторым коэффициентом
![]() , называемым усилением (усиление измеряется
в единицах обратного времени, как и частота).
Передаточные функции замкнутого и незамкнутого циклов для чистого
интегратора -
, называемым усилением (усиление измеряется
в единицах обратного времени, как и частота).
Передаточные функции замкнутого и незамкнутого циклов для чистого
интегратора -
 |
|||
 |
(7) |
Мы хотели бы управлять нашим зеркалом как можно быстрее, чтобы отслеживать меняющиеся атмосферные аберрации. На практике необходимо преодолеть два препятствия:
1. Время реакции.
WFS измеряет сигнал волнового фронта за некоторое время.
Таким образом,
![]() умножается на величину
умножается на величину
![]() для задержки
для задержки ![]() .
Аналогично, определенное время уходит на вычисление управляющего
сигнала (другая задержка), отклик DM замедляется из-за его
резонансов и гистерезиса (гистерезис моделируется как постоянный
сдвиг по фазе). В общем,
.
Аналогично, определенное время уходит на вычисление управляющего
сигнала (другая задержка), отклик DM замедляется из-за его
резонансов и гистерезиса (гистерезис моделируется как постоянный
сдвиг по фазе). В общем,
![]() накапливает дополнительные фазовые задержки с увеличением частоты,
и в результате задержка становится больше
накапливает дополнительные фазовые задержки с увеличением частоты,
и в результате задержка становится больше
![]() .
Это означает, что вместо исправления ошибок, сервосистема будет их
усиливать. Если модуль передаточной функции замкнутого цикла на этой
частоте превысит 1, система станет нестабильной. На практике,
ширина полосы замкнутого цикла составляет от 1/7 до 1/10 от низшей
резонансной частоты деформируемого зеркала.
.
Это означает, что вместо исправления ошибок, сервосистема будет их
усиливать. Если модуль передаточной функции замкнутого цикла на этой
частоте превысит 1, система станет нестабильной. На практике,
ширина полосы замкнутого цикла составляет от 1/7 до 1/10 от низшей
резонансной частоты деформируемого зеркала.
2. Шум. Сигнал об ошибке измеряется WFS с некоторым шумом. В зависимости от яркости опорной звезды, постоянной времени атмосферы и порядка исправления должна быть выбрана оптимальная ширина полосы, которая обеспечивает наилучшую работу системы адаптивной оптики. На практике цикл реоптимизируется во время наблюдений. Это настолько сложно, что здесь мы не будем углубляться в подробности.
Мы рассматривали сигналы
![]() и
и ![]() как непрерывные функции, в то время как в действительности они
вычисляются численно с определенной частотой дискретизации
(так называемая частота цикла). Теория сервосистем с
цифровым управлением еще более сложна.
На практике частота цикла должна быть по крайней мере в 4 раза
выше ширины полосы замкнутого цикла.
как непрерывные функции, в то время как в действительности они
вычисляются численно с определенной частотой дискретизации
(так называемая частота цикла). Теория сервосистем с
цифровым управлением еще более сложна.
На практике частота цикла должна быть по крайней мере в 4 раза
выше ширины полосы замкнутого цикла.
Вопрос: Если нам нужно уменьшить ширину полосы замкнутого цикла в два раза, как мы должны изменить усиление интегратора?
Вопрос: Насколько может быть уменьшена статическая аберрация с помощью сервосистемы с интегратором?
Вопрос: Попытайтесь вычислить передаточную функцию замкнутого цикла для интегратора с задержкой и исследовать условия устойчивости цикла.
Как мы видели, возможности DM исправлять фазовые аберрации ограничены по двум причинам: ограниченному числу актуаторов и задержке реакции.
Ограничение возможности аппроксимировать волновой фронт при
конечном расстоянии между актуаторами приводит к ошибке
аппроксимации: малые детали волнового фронта остаются
неисправленными. Для промежутка между актуаторами
![]() ,
дисперсия фазы ошибки аппроксимации составит
,
дисперсия фазы ошибки аппроксимации составит
| (8) |
Общее количество управляемых актуаторов составляет
![]() ,
поэтому ошибка аппроксимации также равна
,
поэтому ошибка аппроксимации также равна
| (9) |
Если наше деформируемое зеркало могло точно воспроизвести
![]() мод Зернике, ошибку аппроксимации можно найти по асимпотической
формуле Нолля. Индекс степени в этой формуле равен
мод Зернике, ошибку аппроксимации можно найти по асимпотической
формуле Нолля. Индекс степени в этой формуле равен
![]() , сравните с
, сравните с
![]() в формуле выше. Для большого количества управляемых параметров,
исправление мод Зернике дает лучшие результаты, чем местное
исправление волнового фронта. Поэтому биморфные зеркала (которые
точнее воспроизводят моды Зернике) более эффективны, чем сегментные.
в формуле выше. Для большого количества управляемых параметров,
исправление мод Зернике дает лучшие результаты, чем местное
исправление волнового фронта. Поэтому биморфные зеркала (которые
точнее воспроизводят моды Зернике) более эффективны, чем сегментные.
Было показано, что остаточную дисперсию фазы, возникающую из-за ограниченной ширины полосы сервосистемы, можно представить как
| (10) |
В действительности временной спектр коэффициентов Зернике зависит от порядка моды: моды низкого порядка меняются медленнее. Имеет смысл контролировать каждую моду с различным временем реакции, оптимизированным для получения минимальной остаточной ошибки при наличии шума WFS. Этот подход называется модальным управлением и применяется в некоторых системах адаптивной оптики.
Вопрос:
Предположим, что максимальная деградация числа Штреля из-за
ширины полосы управления должна быть 0.9. Какое
![]() необходимо, чтобы добиться этого, если
необходимо, чтобы добиться этого, если
![]() равно 4 мс?
равно 4 мс?
Вопрос:
Для телескопа Джемини
(![]() м)
и качества изображения 1 секунда, вычислите необходимое количество
актуаторов в сегментном зеркале для достижения числа Штреля 0.37
на длине волны 0.5 микрона, и число исправленных мод Зернике,
необходимых для получения того же числа Штреля.
м)
и качества изображения 1 секунда, вычислите необходимое количество
актуаторов в сегментном зеркале для достижения числа Штреля 0.37
на длине волны 0.5 микрона, и число исправленных мод Зернике,
необходимых для получения того же числа Штреля.
Выводы. Теперь мы знаем, как вычислять качество частично исправленных изображений (число Штреля) и как выбирать число контролируемых параметров. Был дан обзор современного состояния и будущих перспектив деформируемых зеркал, введены основные понятия управления в замкнутом цикле. У нас есть формулы для вычисления остаточных ошибок фазы, возникающих из-за конечного расстояния между актуаторами и конечного времени реакции сервосистемы.
ВВЕРХ: Введение
ДАЛЕЕ: Датчики волнового фронта